问题描述
各种几何变换、几何原理傻傻分不清楚?进来看总结。
常见几何原理大分类
- 平面几何(2D->2D)
- 立体几何(3D->3D)
- 投影几何(3D->2D)
- 对极几何(2D<-3D->2D)
- 多视几何(3D->…->2D)
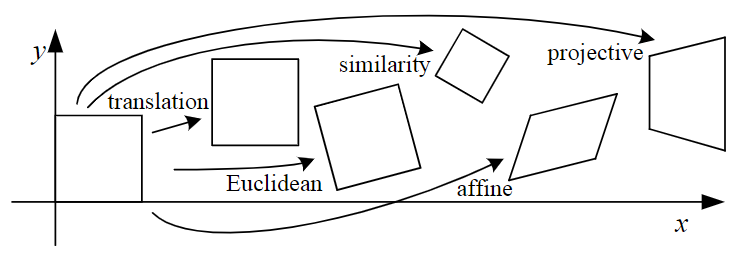
平面几何(2D->2D)
2D 图像常见的变换如下图所示:
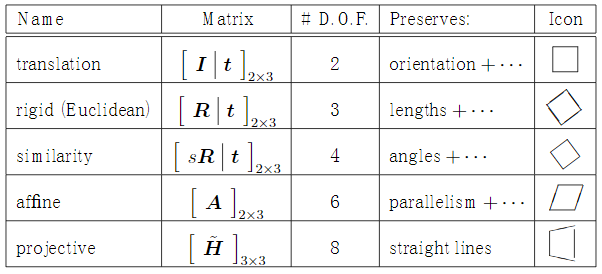
这些几何变换的数学性质如下表所示:
对极几何(2D<-3D->2D)
-
Essential Matrix(本质矩阵)
是什么:描述标定情况下的双目对极约束关系: ${x_2}^TEx_1=0$,其中: $E=\hat{T}R$;
性质:自由度为5(旋转和平移一共6个自由度,尺度等价性,自由度减1);秩为2($\hat{T}$ 的秩为2);
怎么求:求解本质矩阵这一非线性优化问题,可以先优化对应线性最小二乘问题,再将线性解投影到5维本质流形上;也可以直接做非线性优化。特别地,对于已知5对匹配点,求解本质矩阵对应的非线性方程组属于 Kruppa 方程。
-
Fundamental Matrix(基础矩阵)
是什么:描述未标定情况下的双目对极约束关系: ${p_2}^TFp_1=0$,其中: $F=K^{-T}\hat{T}RK^{-1}$;
性质:自由度为7(3x3矩阵一共9个元素,尺度等价性,自由度减1;秩为2,行列式为0,自由度再减1);秩为2($\hat{T}$ 的秩为2);
怎么求:求解基础矩阵这一非线性优化问题,可以先优化对应线性最小二乘问题,再将线性解投影到7维基础流形上;也可以直接做非线性优化。特别地,对于已知7对匹配点,求解基础矩阵对应的非线性方程组属于 Kruppa 方程。
PREVIOUS双目极线校正中的多解问题
NEXT浅析 AR-HUD